Torque is known as the rotational equivalent of a linear force it can also be defined as a measure of force which cause a body to rotate. Torque with respect to the axis of rotation is the product of the magnitude of the force vector lying perpendicular to the axis multiplied to the shortest distance present between the axis and the direction of the force component.
Torque is represented by symbol (τ) Tau.
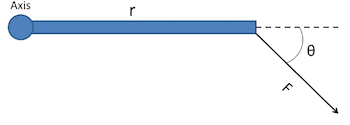
τ = F * r * Sinθ
Where,
- F is the force vector.
- r is the distance between the axis of rotation and the point where linear force is applied.
- θ is the angle between force (F) and distance (r).
Rate this Article: 
 (764 votes, average: 1.12 out of 5)
(764 votes, average: 1.12 out of 5)
(764 votes, average: 1.12 out of 5)